Det åpner seg en ny verden når en utfører makrofotografering. Det å bevege seg inn mot objektet man tar bilder av, for å fange detaljer man normalt ikke legger merke til med det blotte øyet, er utrolig fasinerande. Ikke minst er det svært tilfredstillende å se et stort print av noe som normalt er så lite. Med dagens digitalkamera åpner det seg for mange en mulighet til å utforske makro uten alt for store investeringer. Mange standard objektiv har makro-funksjon og live-view på kamerahuset gjør det enkelt å fokusere korrekt. Men, det er allikevel noen utfordringer som må løses for å få de ekstra gode bildene.

Hvorfor focus stacking?
Når man tar macro-bilder er det normalt at bare en liten del av bildet som er i fokus. Dette henger sammen med forholdet mellom størrelse på bildesensor, brennvidde, avstand til det man tar bilde av og blender-åpningen. Som et eksempel vil et macro-objektiv (på fullformat kamerahus) med 150mm brennvidde, der avstanden til objektet er 40cm og blender er f/5.6 gi en skarphet på knappe 3mm. Hvor mye som er skarpt kan regnes ut manuelt eller man kan bruke en såkalt "DoF" kalkulator (DoF= Depth of Field). Reduseres blenderen til f/28 eller til og med f/32, så ville det skarpe området vært på opp mot en centimeter, men samtidig mister man da den fine bløte bakgrunnen. I tillegg vil den totale skarpheten være betydelig dårligere grunnet diffraksjon i objektivet. Alle objektiv er skarpest innenfor et gitt blender-område, så når man skal ta skarpe makro-bilder så bør man være innenfor dette området. En annen utfordring med liten blender er at det vil kreve ekstremt mye lys for å få et korrekt eksponert bilde.



50 bilder satt sammen i Helicon Focus.
Leica S + Summarit CS 120mmm
f/4.0@1/60s ISO 100

100% forstørrelse av forrige bilde viser god skarphet og fine detaljer
Software
En teknikk som kalles “Focus Stacking", eller stabling av bilder på godt norsk, er en teknikk der man setter sammen flere eksponeringer der fokusområdet er overlappende. Ved å smelte sammen overlappende eksponeringene av objektet som fotograferes så blir resultatet at alt i det stackede området er skarpt, samtidig somfor- og bakgrunn delikat viskes ut som resultat av at alle bildene er tatt med stor blender. Det finnes spesialprogrammer i dag som Zerene og Helicon Focus som er spesialutviklet for å gjøre stacking-jobben. Helicon er i mine øyne det aller enkleste å bruke, samtidig støtter det DNG og RAW-format. Photoshop kan også brukes for stacking, men mangler funksjoner for å skreddersy selve stacking prosessen, i tillegg er det ganske tregt i forhold til andre spesialprogram. Prosessen nedenfor viser (i sanntid) selve stackingen av 50 bilder gjort på en gammel haug av en 27" iMac (2012), hvert bilde har oppløsning på 40 megapixel:
Helicon Focus i aksjon!


En hjemmelaget "Focus Stacking Rail" som på lang vei automatiserer prosessen med macro focus stacking.
Den samme metodikken kan brukes for å lage stop-motion film.

Donor: Focusing rail fra Kirk Enterprise
Lag din egen fockus stacking rail
I skuffen med alt det rare i har jeg allerede liggende en såkalt “Focusing Rail” fra Kirk Enterprise. Dette er en skinne som festes på kamerastativet og som gjør det mulig å manuelt flytte kameraet frem og tilbake. Kirk produserer denne skinnen i to varianter, en der man kan vri på et lite hjul for å skyve kamera frem og tilbake, samt den enkle varianten der man må skyve kameraet for hånd. Jeg har den sistnevnte. Denne skinnen jeg har liggende har fungert tilfredstillende når jeg har tatt et begrenset antall bilder, men ved større antall (20+) bilder og med små steg, så blir denne manuelle metoden for unøyaktig og tidkrevende. Dog er den skinnen et godt utgangspunkt for å lage en automatisert Focus Stacking rigg der kameraet sitter på en vogn der antall steg og avstand mellom hvert steg er programmerbart, samtidig må systemet også kontrollere utløseren på kameraet.






Design
Med utgangspunkt i kommersielt tilgjengelige produkter som Stackshot og WeMacro har jeg en tanke om hvordan min beskjedne Kirk-skinne skal bygges om til å bli en fullblods automatisk makro-rigg. Hvem vet, den vil kanskje fungere godt til såkalt “time-laps” også? Det mekaniske har jeg god kontroll på, likeså utvikling av system for drift og sammensetting av de elektriske komponentene. 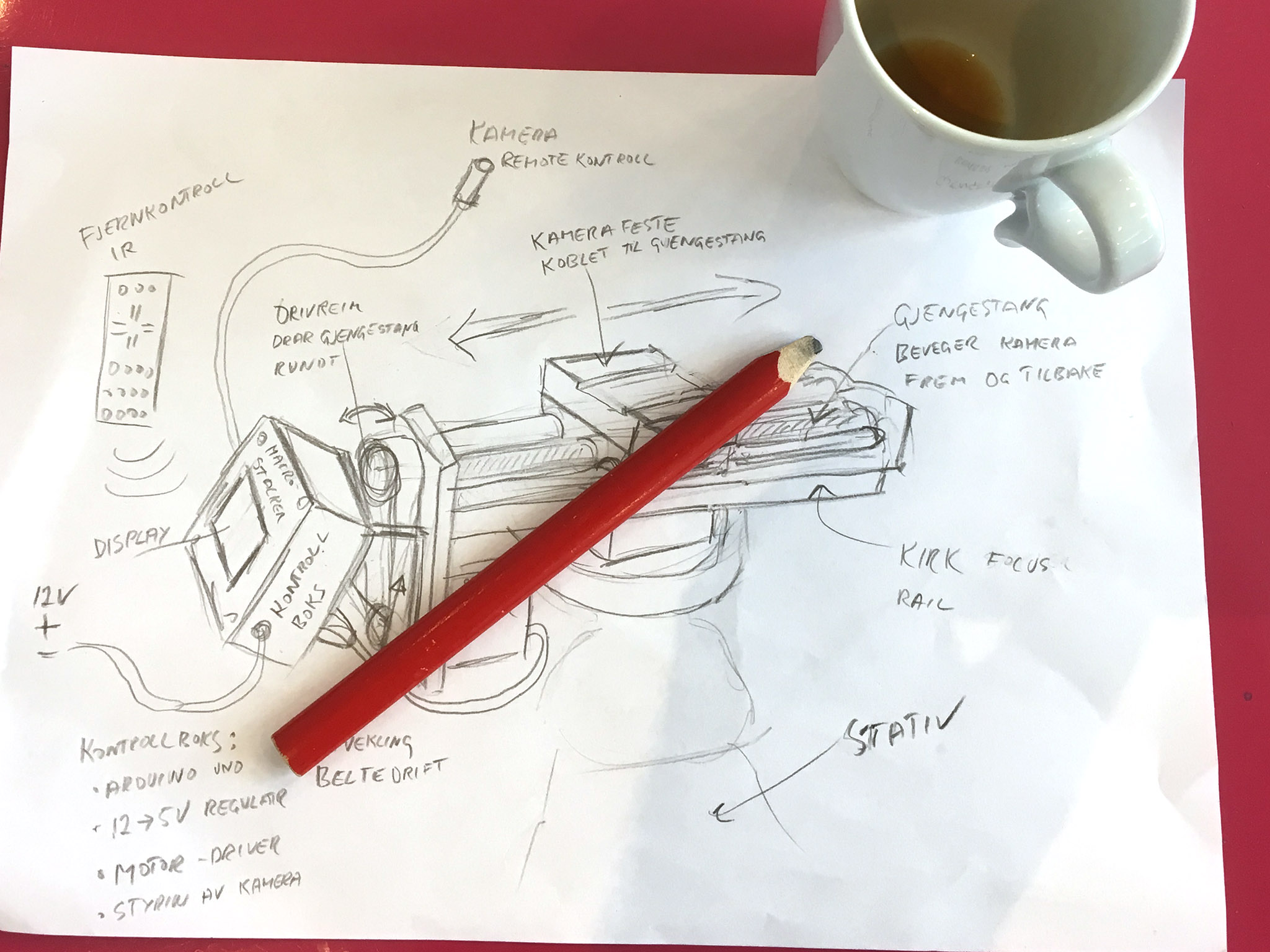 Utfordringen ligger i å utvikle et passende software for styring av funksjonene. Men, når jeg søker på internett etter “DIY Macro Stacking Rail” så dukker det frem et utall kloke hoder som allerede har funnet på mye bra og som har i tillegg gladelig deler informasjon, så jeg er rimelig trygg på å komme i mål. Kilde til inspirasjon har jeg funnet på hjemmesiden til Rylee Isitt
Utfordringen ligger i å utvikle et passende software for styring av funksjonene. Men, når jeg søker på internett etter “DIY Macro Stacking Rail” så dukker det frem et utall kloke hoder som allerede har funnet på mye bra og som har i tillegg gladelig deler informasjon, så jeg er rimelig trygg på å komme i mål. Kilde til inspirasjon har jeg funnet på hjemmesiden til Rylee Isitt
Fra tidligere småprosjekter (Bølgetank for Vitensenteret i Arendal, vanningssystem, alarm i båt osv…) har jeg noe erfaring med Arduino og tilhørende elektroniske komponenter. Arduino er en enkel plattform for å styre og lese fra elektroniske komponenter som består en programmerbar mikrokontroller som styres ved hjelp av et “enkelt” programmeringsspråk gjennom et nedlastbart software til PC/Mac. Tidligere trengtes det omfattende kunnskaper om programmering og elektronikk for å bygge produkter som dette. Et av konseptene med Arduino er at kildekoden er åpen og at det er et stor fellesskap av utviklere slik at selv hobbybyggere med begrensede kunnskaper, som undertegnede, selv kan utvikle spennende produkter og få hjelp på diverse forum.
Den manuelt flyttbare skinnen jeg allerede har må bygges om slik at vognen kan kjøres frem og tilbake med en motor. Kirk’n blir derfor demontert for modifisering. Jeg ser for meg å plassere en lang skrue mellom de to skinnene og som ved rotasjon “skrur” vognen frem og tilbake. På denne måten blir den i prinsippet lik den dyrere varianten fra Kirk. En slik stang (på engelsk: lead screw rod), inkludert mutter som festes i det som skal drives, koster under 100-lappen på eBay.

"Lead screw rod"
Kjøpt på eBay for en 50-lapp
Skruen jeg kjøpte har en diameter på 8mm og lengde på 30 cm. I hver ende må jeg ha et kulelager som festes i de vertikale holderne som holder skinnene på plass. Fra før har jeg liggende en kasse med 19x8x6mm kulelager fra tiden med modellhelikopter. To slike kulelager kommer godt med nå og vil være perfekt for opplagring av den gjengede stangen. Det freses et 19mm sirkulært spor i hver av holderne som senere vil holde fast lagrene ved at de er noen hundredeler på undermål slik at lagrene klemmes fast.
Selve vogna som kameraet skal montres på må få et større spor på undersiden slik at skruen får plass på undersiden. Det er også frest et spor til mutteren som skal skrues fast i vogna.

I den ene enden av den gjengede stangen skal det monteres et hjul for reimdrift fra motoren. Dette reimhjulet har et akselhull på 5 mm, så på den ene siden av den gjengede stangen dreier jeg ned diameteren til 5mm. Siden jeg gjorde en feil her så har jeg måtte kutte stangen noen ekstra cm og erstattet det med en bolt som er skrudd og limt på innsiden av den gjengede stangen. Bolten er så dreid ned til å passe til 5mm akselhull til reimhjul og 8mm for å passe til kulelagret.
 Skinnen fra Kirk ferdig modifisert. Nå skal den monteres
Skinnen fra Kirk ferdig modifisert. Nå skal den monteres
I hver ende av hver skinne har jeg borret og gjenget et M4 hull slik at jeg får noe å feste braketten til motoren i. Et tredje M4 gjenget feste har jeg plassert på selve hoved ramma. Det skulle være tilstrekkelig innfesting for å holde braketten for motor og kontrollboks.
 Ferdig montert. Feste til motor og kontrollboks er det neste. De 3 gjengede hullene på venstre side er for å feste motor-braketten.
Ferdig montert. Feste til motor og kontrollboks er det neste. De 3 gjengede hullene på venstre side er for å feste motor-braketten.
Motorfeste og gear
Braketten for feste av motor og kontrollboks har jeg laget ut av et 6mm tykt plastmateriale kalt Acetal. Det er et seig og kraftig plastmateriale som er enkelt å bearbeide. De to side-platene er utformet for å holde kontrollboksen i en vinkel som gjør det enkelt å lese av displayet på kontrollboksen, samtidig som det blir plass til drivreima til motoren. Drivreim og reim-hjul (“timing pulley belt”) er også kjøpt på eBay. Som tidligere nevnt har jeg valgt en utveksling på 2:1 for å få så fin oppløsning som mulig, samtidig som motoren skal gå med lav belastning når den skal flytte på respektable 2,5 kilo med kamera og objektiv. Reima har en lengde tilpasset en akselavstand på 50mm.

Brakett for innfesting av motor og kontrollboks
Begge reim-hjulene har jeg dreid av det skraverte området vist nedenfor for å gjøre de slankere så de ikke skal bygge ut så mye. Feste-skruer i form av M4 umbraco var plassert i den delen jeg har fjernet, så for å feste hjulene til sin respektive aksling har jeg maskinert nye huller med gjenger i området der spor til reima er.
Annonse

Motoren jeg har er en Mercury “stepper”-motor (https://www.sparkfun.com/products/9238) med oppløsning på 200 step pr. omdreining. Dette er en bi-polar motor som kan drives på 12V likestrøm og maks strømtrekk er 600mA pr. vinding. Ulikt en vanlig elektromotor med børster så må en stepper-motor ha en spesiell kontroller som gir pulser til motoren der hver puls representerer en gitt vinkel-endring på akselen.
En stepper motor og kontroller kombinasjon gjør det enkelt å lage presise system og er derfor vanlig å finne i CNC-maskiner, 3D-printere osv. som krever stor nøyaktighet. Den gjengede stangen som driver kamera-vognen frem og tilbake har en stigning på 4mm pr. omdreining og med 2:1 utveksling ender jeg opp med at vognen vil bevege seg 1-hundredels millimeter pr. step med denne Mercury motoren.

Motor, reim-hjul og reim på plass
Kontrollboks
I kontrollboksen skal må det være plass til:
- 12V til 5V regulator
- Arduino mikrokontroller
- LCD-display
- IR mottaker til fjernkontroll
- Kontroller-krets for å styre motor/trigger til kamera
- Litt ekstra plass til kontakter og ledninger
Jeg fant en fin og solid boks i ubehandlet aluminium der jeg kan få plassert alle komponentene trygt på innsiden. Om du skulle velge en boks i metall må du huske at den leder strøm og at du er uforsiktig med isolering av komponetner så kan det resultere i en kortslutning. Med en plastboks trenger du ikke ta slike hensyn. I utgangspunktet vil jeg prøve å få plass til en Arduino “UNO”, men om det skulle bli for trangt så vil jeg få de samme funksjonene i den mindre varianten av Arduino som kalles “Nano”. Åpning til display, LED og IR-sensor freses ut, i tillegg bores huller for kontakt til motor, strømforsyning og kontroll av kamera.
 På innsiden av kontrollboksen skal alt av elektronikk plasseres
På innsiden av kontrollboksen skal alt av elektronikk plasseres
Elektronikken
For å styre stepper motoren finnes det gode løsninger som allerede er tilpasset Arduino, eksempelvis Easy Driver modulene. Men, siden den softwaren jeg har benyttet meg av ikke støtter en slik kontroller og så har jeg valgt å lage driverkortet omtrent som beskrevet på hjemmesiden til Rylee Isitt. For å drive en steppermotor har jeg derfor brukt en L293D integrert krets som inneholder to såkalte “H-bridges” som kan programmeres til å styre hver side av motoren slik at både hastighet og retning kan kontrolleres. L293D kretsen får signalene sine fra et shift register som er koblet til Arduino´n.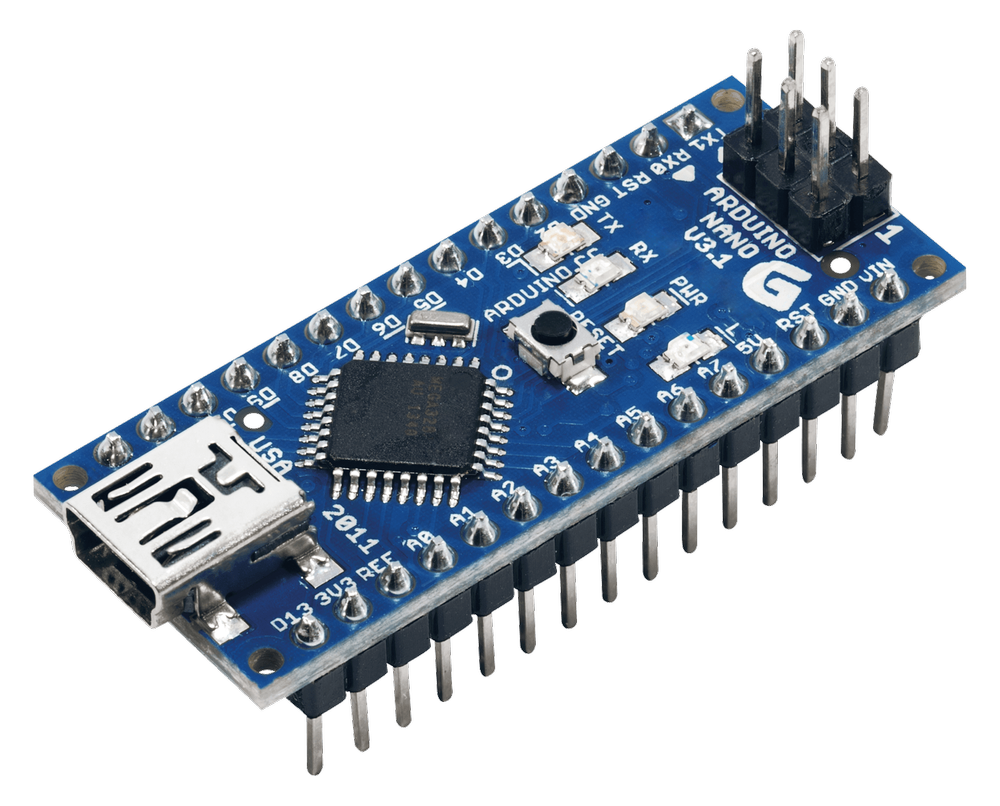
Arduino finnes i en rekke utgaver og fra flere produsenter. Jeg har laget en test med en Arduino klone fra Sparkfun kalt “RedBoard”. Av plasshensyn måtte jeg ty til et mindre kort og da har jeg endt opp med Arduino Nano denne gangen. Funksjonene er de samme, men Nano er ikke større enn 43mm X 18mm. Arduino Nano inneholder:
- En mikrokontroller (ATmega 328)
- En USB inngang for programmering
- 13 digitale inn-/utganger
- 6 analoge inn-/utganger
- Et sett med utganger (3,3V og 5V i tillegg til jord) for å gi strøm til andre komponenter

På digital inngang 2 på Arduino er IR mottakeren tilkoblet. IR signalet kommer fra en Samsung tv-fjernkontroll. Fra fjernkontrollen kan jeg styre alle funksjoner, inkludert av/på med LCD bakgrunnsbelysning og aktivere utløseren i kamera. IR signalene blir tolket av Arduino´n og lar meg velge de forskjellige funksjonene i programmet. Brukergrensesnittet er et LCD display av typen Nokia 5110, i tillegg til en lysdiode som viser når kamerautløseren aktiveres. Arduino styrer motorkontroller L293D og relet for styring av kamera HE3621A0510 gjennom et 8-bit shift register som er koblet til digital utgang 3, 4 og 5 på Arduino´n.

Archimedean spiral funnet i en blomst fra hagen. Blomsten er ca 15mm i diameter.
(Leica S + Summarit S 120mm macro, 30 bilder stacket. f/6@1/125s ISO 100)
Shift registerets to første bit aktiverer eller deaktiverer de to halv-broene i L293D. De neste fire bit setter polariteten på strømmen til vindingene på motoren slik at driv-retningen settes. Alle de 4 utgangene som går til jord (pinne 4, 5, 12 og 13) på L293D kobles sammen slik at de også fungerer som kjøling. Både shift registeret og L293D skal ha 5V for til drift,- denne strømmen må hentes rett fra 12-5V regulatoren. Arduino´n har 5V strømuttak, men dersom dette brukes så vil strømtrekket bli for høyt slik at man risikerer å ødelegge Arduino kortet eller man opplever at Arduino´n blir ustabil/resettes. Shift registerets 7. bit er ikke bruk i min krets, men softwaren har reservert denne til autofokus av kamera. Det siste 8. bit brukes til å aktivere Hamlin-releet for å aktivere utløseren i kameraet.
Motoren har to viklinger, hvor hver Out 1 og Out 2 på L293D skal til den ene viklingen og Out 3 og Out 4 til den andre. På motoren er det 4 ledninger og for å finne ut hvilke ledere som går inn på samme vikling så kan du gjøre følgende test: koble sammen to og to tilfeldige ledere mens du roterer motoren med fingrene. Når du kjenner at motoren går betydelig tyngre mens du kortslutter to ledere så går det leder-paret inn i samme vikling. De to som er igjen går til den andre viklingen. De to parene kan nå kobles til hver side av L293D. Dersom du ønsker å snu retningen på motoren så gjøres det ved å bytte om ledningene på ett av parene til motoren.

|
# |
Funksjon |
Beskrivelse |
Tilkobling |
|
1 |
Reset knapp |
Dersom softwaren skulle henge seg. |
GND og RST på Arduino |
|
2 |
12V inn |
Strøm får jeg fra en veggadapter som som gir 12V ut, opp til 3A |
|
|
3 |
12V ut |
Til motorkontroller |
12V inn på L293D |
|
4 |
5V ut |
Strøm til Arduino, motorkontroller og relé til kamerautløser |
Vcc inn på Arduino. 5V til motor /kamera utløser modul |
|
5 |
12 til 5V regulator |
12v til 5V regulator. Dette er en såkalt "switched" strøm-regulator som gir fra seg lite varme. En LM7805 regulator fungerer også og tar mindre plass |
|
|
6 |
74HC595 Shift register |
En 8 bit kontroller som styrer motorkontroll og utløser-relé for å styre L293D kontroller og Hamlin relé |
|
|
7 |
L293D |
Motorkontrolleren |
|
|
8 |
4 pinners kontakt |
Kobling av drivstrøm til motor. Det er vikitg at vikling A og B kobles riktig |
|
|
9 |
12V inn |
Drivstrøm til motor |
|
|
10 |
5V inn |
Strøm til motorkontroller og relé til kamerautløser |
|
|
11 |
HE3621A0510 |
Relé som styres fra shift registeret. Aktiverer fjernutløseren til kameraet |
|
|
12 |
Tilkobling til Arduino |
Data, latch og clock. Styrer shift registeret |
“Data”: pinne 3 “Latch": pinne 4 “Clock": pinne 5 |
|
13 |
LED |
LED blinker når reléet aktiverer utløser på kamera |
|
|
14 |
Utgang til fjernutløser |
En mini stereo-plugg kobles til her og går til inngangen for fjernutløser på kamera |
|
|
15 |
Nokia 5110 LCD |
LCD 84x84 punkters display som viser alt det morsomme.Motstander er loddet i mellom displayet og Arduino´n som indikert i den skjematiske oversikten vist tidligere. Lys i displayet kan slåes av/på via fjernkontrollen |
Digital utgang 8-13. Og 3,3V og GND |
|
16 |
Arduino Nano |
Mikrokontroller som styrer alt |
|
|
17 |
IR sensor |
Kontrollsystemet er trådløst og får signaler fra en Samsung fjernkontroll til TV |
Input 2 på Arduino. I tillegg 5V og GND |
Etter at alt av hull og åpninger i kontrollboksen er laget ferdig så ble alt prøvemontert og alle funksjoner testet. Alt blir igjen demontert før aluminiumsboksen blir slipt ned med 400 og 600 vannslipepapir før det har fått et lag med grunning og sort lakk. Alle komponenter er så pent og pyntelig montert i kontrollboksen. Siden jeg har valgt å bruke en boks laget i aluminium så må jeg være ekstra forsiktig i forhold til kortslutnings-problematikk. Det hjemmelagde kontrollkortet er montert med dobbeltsidig tape i tillegg til skruer.
Arduino program
Programvaren og nødvendige bibliotek for tolking av IR-signaler, styring av steppermotor og LCD display blir så lastet inn i Arduino Nano`n via en mini USB-kabel fra en Mac/PC som har må ha Arduino-softwaren installert. Før maskinen kan brukes så må noen parametre settes: antall mm vanring pr. motor-omdreining, måleenhet for kjørt distanse, hvor lenge kamerautløser skal holdes inne, motorlås av/på (kjekk funksjon dersom man har skinnen montert vertikalt) og hvorvidt motoren skal kjøres i hele- eller halv steps. Alt av endringer i konfigurasjonsmenyen blir lagret. Så går man inn i meny #1 som kalle "Position" for å sette start- og stopp-punkt. I den samme menyen kan man også kjøre vognen manuelt ved hjelp av pil-tastene på Samsung fjernkontrollen.
Konklusjon
I prinsippet har jeg brukt programmet slik Reylee Isitt har publisert det. Noen små endringer har det blitt og nå jobber jeg å få til programmet slik at jeg kan gå tilbake til et gitt "stack #" for å ta ett bestemt bildet på nytt i tilfelle blitsen skulle feile underveis. Det mekaniske har blitt svært presist og grunnet stepper-motorens oppbygging er det fullt mulig å finne tilbake til en gitt posisjon med stor nøyaktighet. Quadra Hybrid fra Elinchrom har vist seg å være veldig stabil, men jeg opplever at ca 1 av 100 eksponeringer så blir ikke blitsen aktivert. Dette til tross for at jeg aktiverer blitsen med kabel og at det er riklig med strøm på blits-batteriet. Forøvrig skal Elinchrom ha skryt for særdeles jevn og stabil eksponering og hvitbalanse. Avvik her kommer godt til syne når man tar 50+ bilder av det samme motivet etter hverandre.

Displayet i funksjon! Her vises menyen for "Stacking" der man kan taste inn antall bilder, tidsforsinkelse mellom hvert bilder og eventuelt antall "brackets". Sistnevnte kan brukes dersom man vil ha forskjellige eksponeringer pr. steg. Distansen som vises øverst settes i en egen meny som kalles "Position".

Bildet viser motorplassering, gear og baksiden av kontrollboksen. På kontrollboksen sees kontakten til motoren,
utløser (mini-jack) til kamera og kontakt til strøm. Den røde bryteren er for å restarte enhenten dersom alt skulle henge seg.
Det er samme virkning dersom man dra ut strømmen, men en egen bryter er litt coolere.

Her er stackingen i gang. Skjermen viser hvor mange bilder som er tatt samt det totale antallet.
Den blå dioden til høyre blinker når bildet tas. Når programmet er ferdig så kan man trykke "Enter" på fjernkontrollen for
å repetere programmet. Dette er en hendig funksjon dersom man skal ta flere like jobber som ved produktfotografering.
Focus stacker riggen er nå i drift og alt fungerer utmerket! For enkelhetens skyld har jeg til nå valgt å montere riggen på et helt normalt kamerastativ. En dag jeg får lyst og tid skal jeg lage et eget lite bordstativ for apparatet. Alle som har litt kjennskap til elektronikk og ikke alt for mange tommeltotter kan lage noe tilsvarende. En slik "fockus stacking" rigg anbefales for alle som ønsker den type macro-bilder der alt er skarpt, som eksempelvis for produktfotografering eller når man skal svært tett innpå det man tar bilde av. Forøvrig kan maskinen også brukes til såkalt "Time laps".
Mitt mål nå er å komme enda tettere på det jeg tar bilde av. Objektivet jeg har tatt alle bildene i denne artikkelen med er et Summarit S 120mm 1:2 macro. Sistnevnte betegnelse forteller at jeg maksimalt kan få avtegnet det jeg tar bilde av i halv størrelse. Et "ekte" makro-objektiv kan avtegne det man tar bilde av i full størrelse på bildesensoren (1:1). En naturlig måte å gjøre det på er å bruke en såkalt "extender" mellom objektiv og kamera. Slikt finnes ikke til Leica S systemet. Men, det finnes andre gode løsninger i form av adaptere som gjør det mulig å benytte meg av Hasselblad, Pentax 645, Contax eller Mamiya objektiver på mitt Leica S kamerahus. Tiden får vise hvordan dette utvikler seg!
Dersom noen ønsker hjelp eller avklaringer vedrørende den automatiske "Focus Stacker" maskinen er velkommen til å ta kontakt!

![]()
Tilsvarende artikler | Teknisk



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}